> ## Documentation Index
> Fetch the complete documentation index at: https://docs.wandb.ai/llms.txt
> Use this file to discover all available pages before exploring further.
> Journaliser des médias enrichis, des nuages de points 3D et des molécules, jusqu’au HTML et aux histogrammes
# Journaliser des médias et des objets
export const ColabLink = ({url}) =>
Essayer sur Colab
;
Nous prenons en charge les images, la vidéo, l’audio et bien plus encore. Journalisez des médias enrichis pour explorer vos résultats et comparer visuellement vos runs, vos modèles et vos jeux de données. Poursuivez votre lecture pour découvrir des exemples et des guides pratiques.
Pour en savoir plus, consultez la [référence des types de données](/fr/models/ref/python/data-types/).
Pour plus de détails, consultez un [rapport de démonstration sur la visualisation des prédictions d’un modèle](https://wandb.ai/lavanyashukla/visualize-predictions/reports/Visualize-Model-Predictions--Vmlldzo1NjM4OA) ou regardez un [guide pas à pas en vidéo](https://www.youtube.com/watch?v=96MxRvx15Ts).
## Prérequis
Pour journaliser des objets multimédias avec le SDK W\&B, vous devrez peut-être installer des dépendances supplémentaires.
Vous pouvez installer ces dépendances en exécutant la commande suivante :
```bash theme={null}
pip install wandb[media]
```
## Images
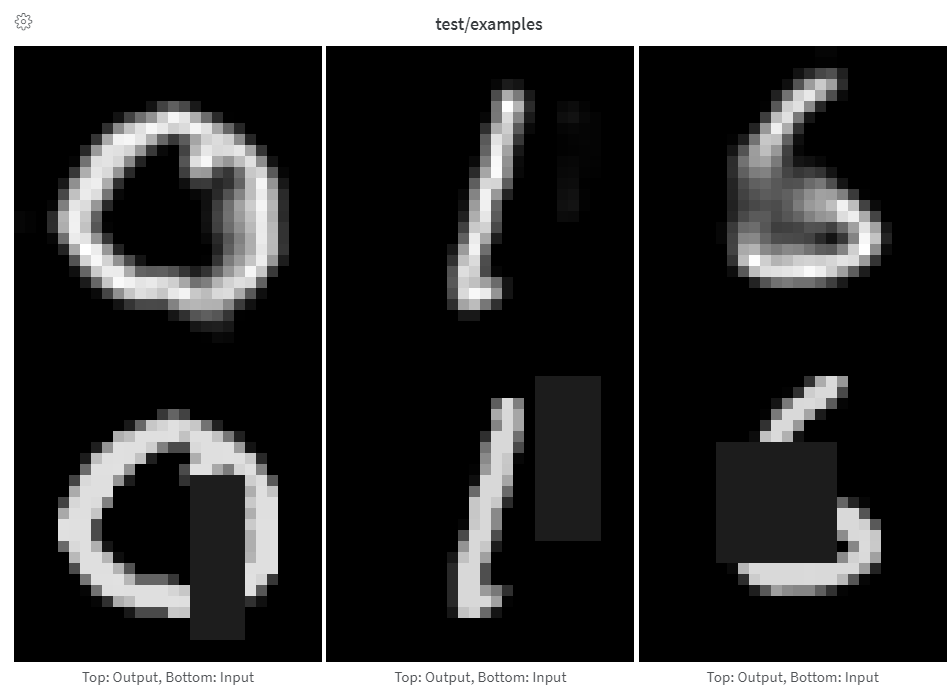
Journalisez des images pour suivre les entrées, les sorties, les poids des filtres, les activations, et plus encore.
Les images peuvent être journalisées directement à partir de tableaux NumPy, comme images PIL, ou depuis le système de fichiers.
Chaque fois que vous journalisez des images à une étape donnée, elles sont disponibles dans l'interface utilisateur. Développez le panneau d'image, puis utilisez le curseur d'étape pour afficher les images de différentes étapes. Cela permet de comparer facilement l'évolution de la sortie d'un modèle pendant l'entraînement. Cliquez sur un panneau multimédia pour afficher une image en mode plein écran ; vous pouvez alors zoomer et vous déplacer dans l'image, y compris à l'aide des [raccourcis clavier](/fr/models/app/keyboard-shortcuts#media-panels).
Pour comparer des images ou des vidéos de différents runs, étapes ou indices dans une même vue, utilisez [Compare mode](/fr/models/app/features/panels/media#compare-mode) dans un panneau multimédia.
Nous vous recommandons de journaliser moins de 50 images par étape afin d'éviter que la journalisation ne devienne un goulot d'étranglement pendant l'entraînement et que le chargement des images ne ralentisse la consultation des résultats.
Fournissez directement les tableaux lors de la création manuelle d'images, par exemple avec [`make_grid` de `torchvision`](https://pytorch.org/vision/stable/utils.html#torchvision.utils.make_grid).
Les tableaux sont convertis en PNG à l'aide de [Pillow](https://pillow.readthedocs.io/en/stable/index.html).
```python theme={null}
import wandb
with wandb.init(project="image-log-example") as run:
images = wandb.Image(image_array, caption="Top: Output, Bottom: Input")
run.log({"examples": images})
```
Nous supposons que l'image est en niveaux de gris si la dernière dimension vaut 1, en RGB si elle vaut 3, et en RGBA si elle vaut 4. Si le tableau contient des nombres à virgule flottante, nous les convertissons en entiers entre `0` et `255`. Si vous souhaitez normaliser vos images autrement, vous pouvez spécifier manuellement le [`mode`](https://pillow.readthedocs.io/en/stable/handbook/concepts.html#modes) ou simplement fournir une [`PIL.Image`](https://pillow.readthedocs.io/en/stable/reference/Image.html), comme décrit dans l'onglet « Journaliser des images PIL » de ce panneau.
Pour contrôler entièrement la conversion des tableaux en images, créez vous-même la [`PIL.Image`](https://pillow.readthedocs.io/en/stable/reference/Image.html) et fournissez-la directement.
```python theme={null}
from PIL import Image
with wandb.init(project="") as run:
# Créez une image PIL à partir d'un tableau NumPy
image = Image.fromarray(image_array)
# Facultativement, convertissez en RGB si nécessaire
if image.mode != "RGB":
image = image.convert("RGB")
# Journalisez l'image
run.log({"example": wandb.Image(image, caption="My Image")})
```
Pour encore plus de contrôle, créez les images comme vous le souhaitez, journalisez-les sur le disque, puis fournissez un chemin de fichier.
```python theme={null}
import wandb
from PIL import Image
with wandb.init(project="") as run:
im = Image.fromarray(...)
rgb_im = im.convert("RGB")
rgb_im.save("myimage.jpg")
run.log({"example": wandb.Image("myimage.jpg")})
```
## Superpositions d’image
Journalisez des masques de segmentation sémantique et interagissez avec eux (en modifiant l’opacité, en visualisant les changements au fil du temps, etc.) via l’interface W\&B.
Pour journaliser une superposition, fournissez un dictionnaire avec les clés et valeurs suivantes au paramètre nommé `masks` de `wandb.Image` :
* l’une des deux clés représentant le masque de l’image :
* `"mask_data"`: un tableau NumPy 2D contenant une étiquette de classe entière pour chaque pixel
* `"path"`: (string) le chemin vers un fichier de masque d’image enregistré
* `"class_labels"`: (facultatif) un dictionnaire associant les étiquettes de classe entières du masque de l’image à des noms de classe lisibles
Pour journaliser plusieurs masques, journalisez un dictionnaire de masques avec plusieurs clés, comme dans l’extrait de code ci-dessous.
[Voir un exemple interactif](https://app.wandb.ai/stacey/deep-drive/reports/Image-Masks-for-Semantic-Segmentation--Vmlldzo4MTUwMw)
[Exemple de code](https://colab.research.google.com/drive/1SOVl3EvW82Q4QKJXX6JtHye4wFix_P4J)
```python theme={null}
mask_data = np.array([[1, 2, 2, ..., 2, 2, 1], ...])
class_labels = {1: "tree", 2: "car", 3: "road"}
mask_img = wandb.Image(
image,
masks={
"predictions": {"mask_data": mask_data, "class_labels": class_labels},
"ground_truth": {
# ...
},
# ...
},
)
```
Les masques de segmentation associés à une clé sont définis à chaque étape (à chaque appel à `run.log()`).
* Si différentes étapes fournissent des valeurs différentes pour une même clé de masque, seule la valeur la plus récente de cette clé est appliquée à l'image.
* Si différentes étapes fournissent des clés de masque différentes, toutes les valeurs de chaque clé sont affichées, mais seules celles définies dans l'étape actuellement affichée sont appliquées à l'image. Activer ou désactiver la visibilité des masques non définis dans cette étape ne modifie pas l'image.
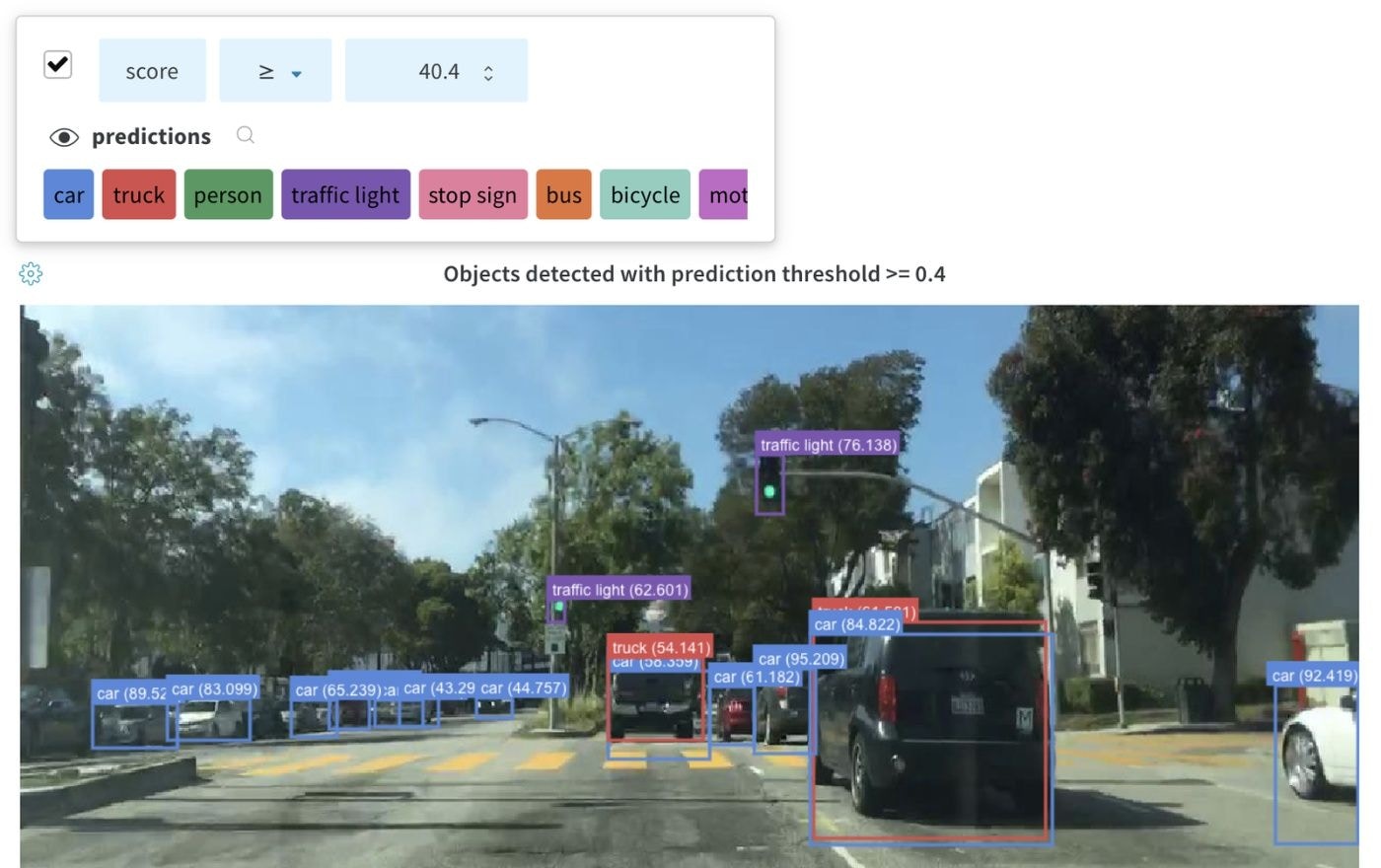
Journalisez des boîtes englobantes avec des images, et utilisez des filtres et des bascules pour visualiser dynamiquement différents ensembles de boîtes dans l’UI.
[Voir un exemple en direct](https://app.wandb.ai/stacey/yolo-drive/reports/Bounding-Boxes-for-Object-Detection--Vmlldzo4Nzg4MQ)
Pour journaliser une boîte englobante, vous devez fournir à l’argument mot-clé `boxes` de `wandb.Image` un dictionnaire contenant les clés et valeurs suivantes :
* `box_data` : une liste de dictionnaires, un pour chaque boîte. Le format du dictionnaire d’une boîte est décrit ci-dessous.
* `position` : un dictionnaire représentant la position et la taille de la boîte dans l’un des deux formats décrits ci-dessous. Les boîtes n’ont pas toutes besoin d’utiliser le même format.
* *Option 1 :* `{"minX", "maxX", "minY", "maxY"}`. Fournissez un ensemble de coordonnées définissant les limites supérieure et inférieure de chaque dimension de la boîte.
* *Option 2 :* `{"middle", "width", "height"}`. Fournissez un ensemble de coordonnées spécifiant les coordonnées `middle` sous la forme `[x,y]`, ainsi que `width` et `height` sous forme de scalaires.
* `class_id` : un entier représentant l’identité de classe de la boîte. Voir la clé `class_labels` ci-dessous.
* `scores` : un dictionnaire d’étiquettes sous forme de chaînes et de valeurs numériques pour les scores. Peut être utilisé pour filtrer les boîtes dans l’UI.
* `domain` : spécifie les unités/le format des coordonnées de la boîte. **Définissez cette valeur sur "pixel"** si les coordonnées de la boîte sont exprimées dans l’espace des pixels, par exemple sous forme d’entiers compris dans les dimensions de l’image. Par défaut, le domaine est supposé être une fraction/un pourcentage de l’image, exprimé sous forme de nombre à virgule flottante entre 0 et 1.
* `box_caption` : (facultatif) une chaîne à afficher comme texte d’étiquette sur cette boîte
* `class_labels` : (facultatif) un dictionnaire associant les `class_id` à des chaînes. Par défaut, nous générons des étiquettes de classe `class_0`, `class_1`, etc.
Consultez cet exemple :
```python theme={null}
import wandb
class_id_to_label = {
1: "car",
2: "road",
3: "building",
# ...
}
img = wandb.Image(
image,
boxes={
"predictions": {
"box_data": [
{
# une boîte exprimée dans le domaine relatif/fractionnel par défaut
"position": {"minX": 0.1, "maxX": 0.2, "minY": 0.3, "maxY": 0.4},
"class_id": 2,
"box_caption": class_id_to_label[2],
"scores": {"acc": 0.1, "loss": 1.2},
# une autre boîte exprimée dans le domaine des pixels
# (à titre d'illustration uniquement, toutes les boîtes sont
# susceptibles d'être dans le même domaine/format)
"position": {"middle": [150, 20], "width": 68, "height": 112},
"domain": "pixel",
"class_id": 3,
"box_caption": "a building",
"scores": {"acc": 0.5, "loss": 0.7},
# ...
# Journalisez autant de boîtes que nécessaire
}
],
"class_labels": class_id_to_label,
},
# Journalisez chaque groupe significatif de boîtes avec un nom de clé unique
"ground_truth": {
# ...
},
},
)
with wandb.init(project="my_project") as run:
run.log({"driving_scene": img})
```
## Superpositions d’images dans Tables
Pour journaliser des masques de segmentation dans Tables, vous devez fournir un objet `wandb.Image` pour chaque ligne du tableau.
Un exemple est fourni dans l’extrait de code ci-dessous :
```python theme={null}
table = wandb.Table(columns=["ID", "Image"])
for id, img, label in zip(ids, images, labels):
mask_img = wandb.Image(
img,
masks={
"prediction": {"mask_data": label, "class_labels": class_labels}
# ...
},
)
table.add_data(id, mask_img)
with wandb.init(project="my_project") as run:
run.log({"Table": table})
```
Pour journaliser des images avec des boîtes englobantes dans Tables, vous devez fournir un objet `wandb.Image` pour chaque ligne du tableau.
Un exemple est fourni dans l’extrait de code ci-dessous :
```python theme={null}
table = wandb.Table(columns=["ID", "Image"])
for id, img, boxes in zip(ids, images, boxes_set):
box_img = wandb.Image(
img,
boxes={
"prediction": {
"box_data": [
{
"position": {
"minX": box["minX"],
"minY": box["minY"],
"maxX": box["maxX"],
"maxY": box["maxY"],
},
"class_id": box["class_id"],
"box_caption": box["caption"],
"domain": "pixel",
}
for box in boxes
],
"class_labels": class_labels,
}
},
)
```
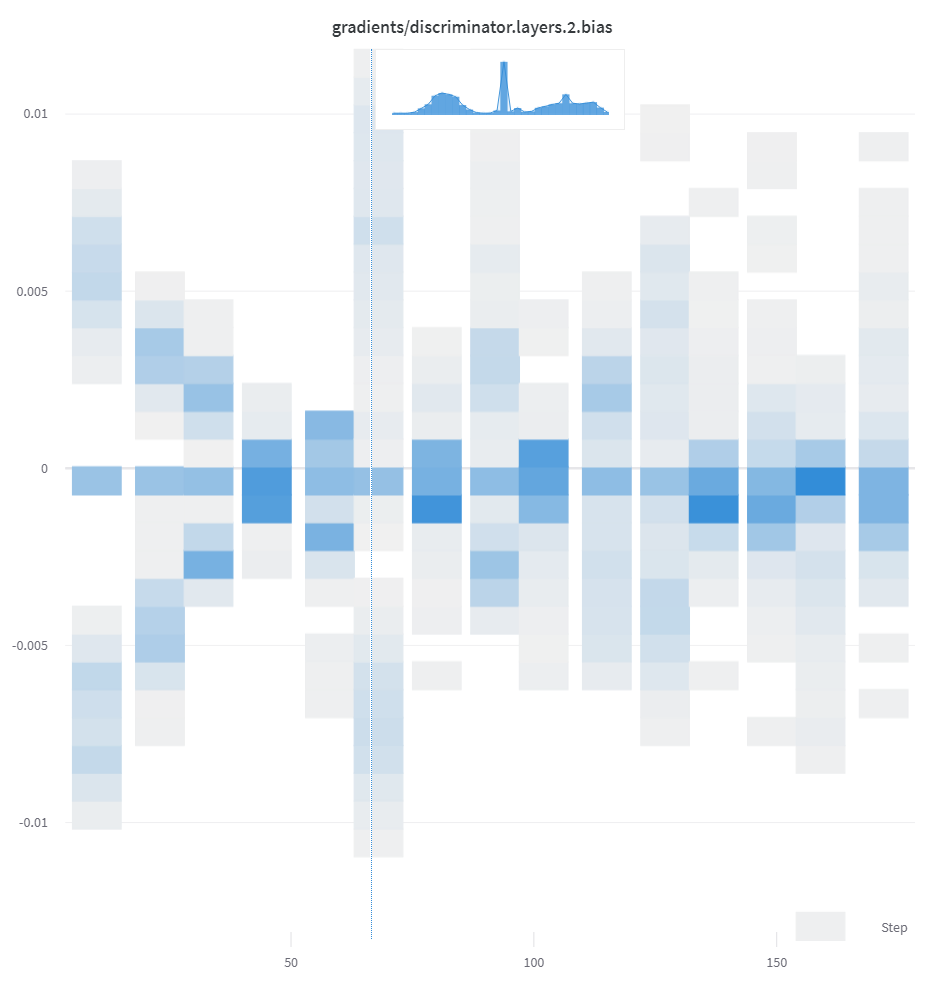
## Histogrammes
Si une séquence de nombres, comme une liste, un tableau ou un tenseur, est fournie comme premier argument, nous créons automatiquement l’histogramme en appelant `np.histogram()`. Tous les tableaux/tenseurs sont aplatis. Vous pouvez utiliser l’argument mot-clé facultatif `num_bins` pour remplacer la valeur par défaut de `64` bins. Le nombre maximal de bins pris en charge est de `512`.
Dans l’interface utilisateur, les histogrammes sont tracés avec l’étape d’entraînement sur l’axe des x, la valeur de la métrique sur l’axe des y, et le nombre représenté par la couleur, afin de faciliter la comparaison des histogrammes enregistrés tout au long de l’entraînement. Voir l’onglet « Histogrammes dans le summary » de ce panneau pour plus de détails sur la journalisation d’histogrammes ponctuels.
```python theme={null}
run.log({"gradients": wandb.Histogram(grads)})
```
Si vous souhaitez plus de contrôle, appelez `np.histogram()` et transmettez le tuple renvoyé à l’argument mot-clé `np_histogram`.
```python theme={null}
np_hist_grads = np.histogram(grads, density=True, range=(0.0, 1.0))
run.log({"gradients": wandb.Histogram(np_hist_grads)})
```
Si des histogrammes figurent dans votre summary, ils apparaîtront dans l’onglet Vue d’ensemble de la [page du run](/fr/models/runs/). S’ils figurent dans votre historique, nous affichons une carte thermique des bins au fil du temps dans l’onglet Charts.
## Visualisations 3D
Journalisez des nuages de points 3D et des scènes LiDAR avec des boîtes englobantes. Passez un tableau NumPy contenant les coordonnées et les couleurs des points pour le rendu.
```python theme={null}
point_cloud = np.array([[0, 0, 0, COLOR]])
run.log({"point_cloud": wandb.Object3D(point_cloud)})
```
L'UI de W\&B tronque les données au-delà de 300 000 points.
#### Formats de tableaux NumPy
Trois formats différents de tableaux NumPy sont pris en charge pour permettre des schémas de couleurs flexibles.
* `[[x, y, z], ...]` `nx3`
* `[[x, y, z, c], ...]` `nx4` `| c est une catégorie` dans l’intervalle `[1, 14]` (utile pour la segmentation)
* `[[x, y, z, r, g, b], ...]` `nx6 | r,g,b` sont des valeurs dans l’intervalle `[0,255]` pour les canaux de couleur rouge, vert et bleu.
#### Objet Python
Avec ce schéma, vous pouvez définir un objet Python et le transmettre à [la méthode `from_point_cloud`](/fr/models/ref/python/#from_point_cloud).
* `points` est un tableau NumPy contenant les coordonnées et les couleurs des points à afficher, en utilisant [les mêmes formats que ceux du rendu simple de nuage de points présenté ci-dessus](#python-object).
* `boxes` est un tableau NumPy de dictionnaires Python avec les attributs suivants :
* `corners`- une liste de huit sommets
* `label`- une chaîne représentant l'étiquette à afficher sur la boîte (facultatif)
* `color`- des valeurs RGB représentant la couleur de la boîte
* `score` - une valeur numérique affichée sur la boîte englobante, qui peut être utilisée pour filtrer les boîtes englobantes affichées (par exemple, pour afficher uniquement les boîtes englobantes où `score` > `0.75`). (facultatif)
* `type` est une chaîne représentant le type de scène à afficher. Actuellement, la seule valeur prise en charge est `lidar/beta`
```python theme={null}
point_list = [
[
2566.571924017235, # x
746.7817289698219, # y
-15.269245470863748,# z
76.5, # rouge
127.5, # vert
89.46617199365393 # bleu
],
[ 2566.592983606823, 746.6791987335685, -15.275803826279521, 76.5, 127.5, 89.45471117247024 ],
[ 2566.616361739416, 746.4903185513501, -15.28628929674075, 76.5, 127.5, 89.41336375503832 ],
[ 2561.706014951675, 744.5349468458361, -14.877496818222781, 76.5, 127.5, 82.21868245418283 ],
[ 2561.5281847916694, 744.2546118233013, -14.867862032341005, 76.5, 127.5, 81.87824684536432 ],
[ 2561.3693562897465, 744.1804761656741, -14.854129178142523, 76.5, 127.5, 81.64137897587152 ],
[ 2561.6093071504515, 744.0287526628543, -14.882135189841177, 76.5, 127.5, 81.89871499537098 ],
# ... et ainsi de suite
]
run.log({"my_first_point_cloud": wandb.Object3D.from_point_cloud(
points = point_list,
boxes = [{
"corners": [
[ 2601.2765123137915, 767.5669506323393, -17.816764802288663 ],
[ 2599.7259021588347, 769.0082337923552, -17.816764802288663 ],
[ 2599.7259021588347, 769.0082337923552, -19.66876480228866 ],
[ 2601.2765123137915, 767.5669506323393, -19.66876480228866 ],
[ 2604.8684867834395, 771.4313904894723, -17.816764802288663 ],
[ 2603.3178766284827, 772.8726736494882, -17.816764802288663 ],
[ 2603.3178766284827, 772.8726736494882, -19.66876480228866 ],
[ 2604.8684867834395, 771.4313904894723, -19.66876480228866 ]
],
"color": [0, 0, 255], # couleur en RGB de la boîte englobante
"label": "car", # chaîne affichée sur la boîte englobante
"score": 0.6 # valeur numérique affichée sur la boîte englobante
}],
vectors = [
{"start": [0, 0, 0], "end": [0.1, 0.2, 0.5], "color": [255, 0, 0]}, # la couleur est facultative
],
point_cloud_type = "lidar/beta",
)})
```
Lorsque vous visualisez un nuage de points, vous pouvez, tout en maintenant la touche Ctrl enfoncée, utiliser la souris pour vous déplacer dans l’espace.
#### Fichiers de nuages de points
Vous pouvez utiliser [la méthode `from_file`](/fr/models/ref/python/#from_file) pour charger un fichier JSON contenant des données de nuages de points.
```python theme={null}
run.log({"my_cloud_from_file": wandb.Object3D.from_file(
"./my_point_cloud.pts.json"
)})
```
Un exemple du format des données de nuage de points est présenté ci-dessous.
```json theme={null}
{
"boxes": [
{
"color": [
0,
255,
0
],
"score": 0.35,
"label": "My label",
"corners": [
[
2589.695869075582,
760.7400443552185,
-18.044831294622487
],
[
2590.719039645323,
762.3871153874499,
-18.044831294622487
],
[
2590.719039645323,
762.3871153874499,
-19.54083129462249
],
[
2589.695869075582,
760.7400443552185,
-19.54083129462249
],
[
2594.9666662674313,
757.4657929961453,
-18.044831294622487
],
[
2595.9898368371723,
759.1128640283766,
-18.044831294622487
],
[
2595.9898368371723,
759.1128640283766,
-19.54083129462249
],
[
2594.9666662674313,
757.4657929961453,
-19.54083129462249
]
]
}
],
"points": [
[
2566.571924017235,
746.7817289698219,
-15.269245470863748,
76.5,
127.5,
89.46617199365393
],
[
2566.592983606823,
746.6791987335685,
-15.275803826279521,
76.5,
127.5,
89.45471117247024
],
[
2566.616361739416,
746.4903185513501,
-15.28628929674075,
76.5,
127.5,
89.41336375503832
]
],
"type": "lidar/beta"
}
```
#### Tableaux NumPy
À l’aide [des mêmes formats de tableaux définis ci-dessus](#numpy-array-formats), vous pouvez utiliser directement des tableaux `numpy` avec [la méthode `from_numpy`](/fr/models/ref/python/#from_numpy) pour définir un nuage de points.
```python theme={null}
run.log({"my_cloud_from_numpy_xyz": wandb.Object3D.from_numpy(
np.array(
[
[0.4, 1, 1.3], # x, y, z
[1, 1, 1],
[1.2, 1, 1.2]
]
)
)})
```
```python theme={null}
run.log({"my_cloud_from_numpy_cat": wandb.Object3D.from_numpy(
np.array(
[
[0.4, 1, 1.3, 1], # x, y, z, category
[1, 1, 1, 1],
[1.2, 1, 1.2, 12],
[1.2, 1, 1.3, 12],
[1.2, 1, 1.4, 12],
[1.2, 1, 1.5, 12],
[1.2, 1, 1.6, 11],
[1.2, 1, 1.7, 11],
]
)
)})
```
```python theme={null}
run.log({"my_cloud_from_numpy_rgb": wandb.Object3D.from_numpy(
np.array(
[
[0.4, 1, 1.3, 255, 0, 0], # x, y, z, r, g, b
[1, 1, 1, 0, 255, 0],
[1.2, 1, 1.3, 0, 255, 255],
[1.2, 1, 1.4, 0, 255, 255],
[1.2, 1, 1.5, 0, 0, 255],
[1.2, 1, 1.1, 0, 0, 255],
[1.2, 1, 0.9, 0, 0, 255],
]
)
)})
```
```python theme={null}
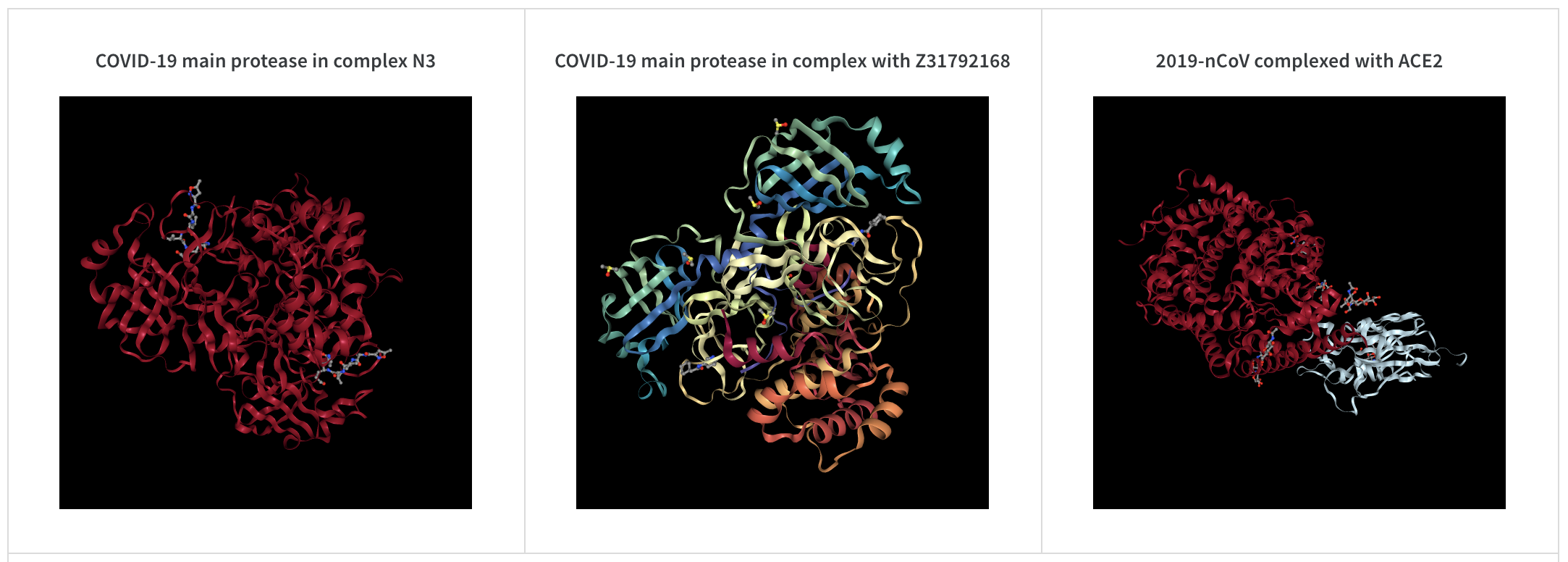
run.log({"protein": wandb.Molecule("6lu7.pdb")})
```
Journalisez des données moléculaires dans l’un des 10 types de fichiers suivants :`pdb`, `pqr`, `mmcif`, `mcif`, `cif`, `sdf`, `sd`, `gro`, `mol2` ou `mmtf.`
W\&B prend également en charge la journalisation de données moléculaires à partir de chaînes SMILES, de fichiers `mol` de [`rdkit`](https://www.rdkit.org/docs/index.html) et d’objets `rdkit.Chem.rdchem.Mol`.
```python theme={null}
resveratrol = rdkit.Chem.MolFromSmiles("Oc1ccc(cc1)C=Cc1cc(O)cc(c1)O")
run.log(
{
"resveratrol": wandb.Molecule.from_rdkit(resveratrol),
"green fluorescent protein": wandb.Molecule.from_rdkit("2b3p.mol"),
"acetaminophen": wandb.Molecule.from_smiles("CC(=O)Nc1ccc(O)cc1"),
}
)
```
Une fois votre run terminé, vous pourrez interagir avec les visualisations 3D de vos molécules dans l’interface.
[Voir un exemple en direct avec AlphaFold](https://wandb.me/alphafold-workspace)
### Image PNG
[`wandb.Image`](/fr/models/ref/python/data-types/image) convertit par défaut les tableaux `numpy` ou les instances de `PILImage` en fichiers PNG.
```python theme={null}
run.log({"example": wandb.Image(...)})
# Ou plusieurs images
run.log({"example": [wandb.Image(...) for img in images]})
```
### Vidéo
Les vidéos sont enregistrées avec le type de données [`wandb.Video`](/fr/models/ref/python/) :
```python theme={null}
run.log({"example": wandb.Video("myvideo.mp4")})
```
Vous pouvez maintenant visualiser des vidéos dans l’explorateur de médias. Accédez à l’espace de travail de votre projet, à l’espace de travail du run ou à votre rapport, puis cliquez sur **Ajouter une visualisation** pour ajouter un panneau de médias enrichis.
## Vue 2D d'une molécule
Vous pouvez journaliser une vue 2D d'une molécule à l'aide du type de données [`wandb.Image`](/fr/models/ref/python/data-types/image) et de [`rdkit`](https://www.rdkit.org/docs/index.html) :
```python theme={null}
molecule = rdkit.Chem.MolFromSmiles("CC(=O)O")
rdkit.Chem.AllChem.Compute2DCoords(molecule)
rdkit.Chem.AllChem.GenerateDepictionMatching2DStructure(molecule, molecule)
pil_image = rdkit.Chem.Draw.MolToImage(molecule, size=(300, 300))
run.log({"acetic_acid": wandb.Image(pil_image)})
```
## Autres médias
W\&B prend également en charge l'enregistrement de divers autres types de médias.
### Audio
```python theme={null}
run.log({"whale songs": wandb.Audio(np_array, caption="OooOoo", sample_rate=32)})
```
Un maximum de 100 clips audio peuvent être enregistrés par étape. Pour plus d’informations sur l’utilisation, voir [`audio-file`](/fr/models/ref/query-panel/audio-file).
### Vidéo
```python theme={null}
run.log({"video": wandb.Video(numpy_array_or_path_to_video, fps=4, format="gif")})
```
Si un tableau numpy est fourni, nous supposons que les dimensions sont, dans l’ordre : temps, canaux, largeur, hauteur. Par défaut, nous créons une image GIF à 4 fps ([`ffmpeg`](https://www.ffmpeg.org) et la bibliothèque Python [`moviepy`](https://pypi.org/project/moviepy/) sont requis lors du passage d’objets numpy). Les formats pris en charge sont `"gif"`, `"mp4"`, `"webm"` et `"ogg"`. Si vous passez une chaîne à `wandb.Video`, nous vérifions que le fichier existe et qu’il est dans un format pris en charge avant de le téléverser sur wandb. Le passage d’un objet `BytesIO` crée un fichier temporaire avec le format spécifié comme extension.
Sur les pages W\&B [Run](/fr/models/runs/) et [projet](/fr/models/track/project-page/), vous verrez vos vidéos dans la section Média.
Pour plus d’informations sur l’utilisation, voir [`video-file`](/fr/models/ref/query-panel/video-file).
### Texte
Utilisez `wandb.Table` pour journaliser du texte dans des tableaux afin de l’afficher dans l’interface utilisateur. Par défaut, les en-têtes de colonne sont `["Input", "Output", "Expected"]`. Pour des performances optimales de l’interface utilisateur, le nombre maximal de lignes par défaut est fixé à 10 000. Cependant, vous pouvez explicitement redéfinir ce maximum avec `wandb.Table.MAX_ROWS = {DESIRED_MAX}`.
```python theme={null}
with wandb.init(project="my_project") as run:
columns = ["Text", "Predicted Sentiment", "True Sentiment"]
# Méthode 1
data = [["I love my phone", "1", "1"], ["My phone sucks", "0", "-1"]]
table = wandb.Table(data=data, columns=columns)
run.log({"examples": table})
# Méthode 2
table = wandb.Table(columns=columns)
table.add_data("I love my phone", "1", "1")
table.add_data("My phone sucks", "0", "-1")
run.log({"examples": table})
```
Vous pouvez également passer un objet `DataFrame` pandas.
```python theme={null}
table = wandb.Table(dataframe=my_dataframe)
```
Pour plus d’informations sur l’utilisation, voir [`string`](/fr/models/ref/query-panel/).
### HTML
```python theme={null}
run.log({"custom_file": wandb.Html(open("some.html"))})
run.log({"custom_string": wandb.Html('Link')})
```
Journalisez du HTML personnalisé avec n’importe quelle clé afin d’afficher un panneau HTML sur la page du run. Par défaut, nous injectons les styles par défaut ; vous pouvez désactiver cette injection en passant `inject=False`.
```python theme={null}
run.log({"custom_file": wandb.Html(open("some.html"), inject=False)})
```
Pour en savoir plus sur l’utilisation, voir [`html-file`](/fr/models/ref/query-panel/html-file).
 Les images peuvent être journalisées directement à partir de tableaux NumPy, comme images PIL, ou depuis le système de fichiers.
Chaque fois que vous journalisez des images à une étape donnée, elles sont disponibles dans l'interface utilisateur. Développez le panneau d'image, puis utilisez le curseur d'étape pour afficher les images de différentes étapes. Cela permet de comparer facilement l'évolution de la sortie d'un modèle pendant l'entraînement. Cliquez sur un panneau multimédia pour afficher une image en mode plein écran ; vous pouvez alors zoomer et vous déplacer dans l'image, y compris à l'aide des [raccourcis clavier](/fr/models/app/keyboard-shortcuts#media-panels).
Pour comparer des images ou des vidéos de différents runs, étapes ou indices dans une même vue, utilisez [Compare mode](/fr/models/app/features/panels/media#compare-mode) dans un panneau multimédia.
Les images peuvent être journalisées directement à partir de tableaux NumPy, comme images PIL, ou depuis le système de fichiers.
Chaque fois que vous journalisez des images à une étape donnée, elles sont disponibles dans l'interface utilisateur. Développez le panneau d'image, puis utilisez le curseur d'étape pour afficher les images de différentes étapes. Cela permet de comparer facilement l'évolution de la sortie d'un modèle pendant l'entraînement. Cliquez sur un panneau multimédia pour afficher une image en mode plein écran ; vous pouvez alors zoomer et vous déplacer dans l'image, y compris à l'aide des [raccourcis clavier](/fr/models/app/keyboard-shortcuts#media-panels).
Pour comparer des images ou des vidéos de différents runs, étapes ou indices dans une même vue, utilisez [Compare mode](/fr/models/app/features/panels/media#compare-mode) dans un panneau multimédia.
 Pour journaliser une superposition, fournissez un dictionnaire avec les clés et valeurs suivantes au paramètre nommé `masks` de `wandb.Image` :
* l’une des deux clés représentant le masque de l’image :
* `"mask_data"`: un tableau NumPy 2D contenant une étiquette de classe entière pour chaque pixel
* `"path"`: (string) le chemin vers un fichier de masque d’image enregistré
* `"class_labels"`: (facultatif) un dictionnaire associant les étiquettes de classe entières du masque de l’image à des noms de classe lisibles
Pour journaliser plusieurs masques, journalisez un dictionnaire de masques avec plusieurs clés, comme dans l’extrait de code ci-dessous.
[Voir un exemple interactif](https://app.wandb.ai/stacey/deep-drive/reports/Image-Masks-for-Semantic-Segmentation--Vmlldzo4MTUwMw)
[Exemple de code](https://colab.research.google.com/drive/1SOVl3EvW82Q4QKJXX6JtHye4wFix_P4J)
```python theme={null}
mask_data = np.array([[1, 2, 2, ..., 2, 2, 1], ...])
class_labels = {1: "tree", 2: "car", 3: "road"}
mask_img = wandb.Image(
image,
masks={
"predictions": {"mask_data": mask_data, "class_labels": class_labels},
"ground_truth": {
# ...
},
# ...
},
)
```
Les masques de segmentation associés à une clé sont définis à chaque étape (à chaque appel à `run.log()`).
* Si différentes étapes fournissent des valeurs différentes pour une même clé de masque, seule la valeur la plus récente de cette clé est appliquée à l'image.
* Si différentes étapes fournissent des clés de masque différentes, toutes les valeurs de chaque clé sont affichées, mais seules celles définies dans l'étape actuellement affichée sont appliquées à l'image. Activer ou désactiver la visibilité des masques non définis dans cette étape ne modifie pas l'image.
Pour journaliser une superposition, fournissez un dictionnaire avec les clés et valeurs suivantes au paramètre nommé `masks` de `wandb.Image` :
* l’une des deux clés représentant le masque de l’image :
* `"mask_data"`: un tableau NumPy 2D contenant une étiquette de classe entière pour chaque pixel
* `"path"`: (string) le chemin vers un fichier de masque d’image enregistré
* `"class_labels"`: (facultatif) un dictionnaire associant les étiquettes de classe entières du masque de l’image à des noms de classe lisibles
Pour journaliser plusieurs masques, journalisez un dictionnaire de masques avec plusieurs clés, comme dans l’extrait de code ci-dessous.
[Voir un exemple interactif](https://app.wandb.ai/stacey/deep-drive/reports/Image-Masks-for-Semantic-Segmentation--Vmlldzo4MTUwMw)
[Exemple de code](https://colab.research.google.com/drive/1SOVl3EvW82Q4QKJXX6JtHye4wFix_P4J)
```python theme={null}
mask_data = np.array([[1, 2, 2, ..., 2, 2, 1], ...])
class_labels = {1: "tree", 2: "car", 3: "road"}
mask_img = wandb.Image(
image,
masks={
"predictions": {"mask_data": mask_data, "class_labels": class_labels},
"ground_truth": {
# ...
},
# ...
},
)
```
Les masques de segmentation associés à une clé sont définis à chaque étape (à chaque appel à `run.log()`).
* Si différentes étapes fournissent des valeurs différentes pour une même clé de masque, seule la valeur la plus récente de cette clé est appliquée à l'image.
* Si différentes étapes fournissent des clés de masque différentes, toutes les valeurs de chaque clé sont affichées, mais seules celles définies dans l'étape actuellement affichée sont appliquées à l'image. Activer ou désactiver la visibilité des masques non définis dans cette étape ne modifie pas l'image.
 [Voir un exemple en direct](https://app.wandb.ai/stacey/yolo-drive/reports/Bounding-Boxes-for-Object-Detection--Vmlldzo4Nzg4MQ)
Pour journaliser une boîte englobante, vous devez fournir à l’argument mot-clé `boxes` de `wandb.Image` un dictionnaire contenant les clés et valeurs suivantes :
* `box_data` : une liste de dictionnaires, un pour chaque boîte. Le format du dictionnaire d’une boîte est décrit ci-dessous.
* `position` : un dictionnaire représentant la position et la taille de la boîte dans l’un des deux formats décrits ci-dessous. Les boîtes n’ont pas toutes besoin d’utiliser le même format.
* *Option 1 :* `{"minX", "maxX", "minY", "maxY"}`. Fournissez un ensemble de coordonnées définissant les limites supérieure et inférieure de chaque dimension de la boîte.
* *Option 2 :* `{"middle", "width", "height"}`. Fournissez un ensemble de coordonnées spécifiant les coordonnées `middle` sous la forme `[x,y]`, ainsi que `width` et `height` sous forme de scalaires.
* `class_id` : un entier représentant l’identité de classe de la boîte. Voir la clé `class_labels` ci-dessous.
* `scores` : un dictionnaire d’étiquettes sous forme de chaînes et de valeurs numériques pour les scores. Peut être utilisé pour filtrer les boîtes dans l’UI.
* `domain` : spécifie les unités/le format des coordonnées de la boîte. **Définissez cette valeur sur "pixel"** si les coordonnées de la boîte sont exprimées dans l’espace des pixels, par exemple sous forme d’entiers compris dans les dimensions de l’image. Par défaut, le domaine est supposé être une fraction/un pourcentage de l’image, exprimé sous forme de nombre à virgule flottante entre 0 et 1.
* `box_caption` : (facultatif) une chaîne à afficher comme texte d’étiquette sur cette boîte
* `class_labels` : (facultatif) un dictionnaire associant les `class_id` à des chaînes. Par défaut, nous générons des étiquettes de classe `class_0`, `class_1`, etc.
Consultez cet exemple :
```python theme={null}
import wandb
class_id_to_label = {
1: "car",
2: "road",
3: "building",
# ...
}
img = wandb.Image(
image,
boxes={
"predictions": {
"box_data": [
{
# une boîte exprimée dans le domaine relatif/fractionnel par défaut
"position": {"minX": 0.1, "maxX": 0.2, "minY": 0.3, "maxY": 0.4},
"class_id": 2,
"box_caption": class_id_to_label[2],
"scores": {"acc": 0.1, "loss": 1.2},
# une autre boîte exprimée dans le domaine des pixels
# (à titre d'illustration uniquement, toutes les boîtes sont
# susceptibles d'être dans le même domaine/format)
"position": {"middle": [150, 20], "width": 68, "height": 112},
"domain": "pixel",
"class_id": 3,
"box_caption": "a building",
"scores": {"acc": 0.5, "loss": 0.7},
# ...
# Journalisez autant de boîtes que nécessaire
}
],
"class_labels": class_id_to_label,
},
# Journalisez chaque groupe significatif de boîtes avec un nom de clé unique
"ground_truth": {
# ...
},
},
)
with wandb.init(project="my_project") as run:
run.log({"driving_scene": img})
```
[Voir un exemple en direct](https://app.wandb.ai/stacey/yolo-drive/reports/Bounding-Boxes-for-Object-Detection--Vmlldzo4Nzg4MQ)
Pour journaliser une boîte englobante, vous devez fournir à l’argument mot-clé `boxes` de `wandb.Image` un dictionnaire contenant les clés et valeurs suivantes :
* `box_data` : une liste de dictionnaires, un pour chaque boîte. Le format du dictionnaire d’une boîte est décrit ci-dessous.
* `position` : un dictionnaire représentant la position et la taille de la boîte dans l’un des deux formats décrits ci-dessous. Les boîtes n’ont pas toutes besoin d’utiliser le même format.
* *Option 1 :* `{"minX", "maxX", "minY", "maxY"}`. Fournissez un ensemble de coordonnées définissant les limites supérieure et inférieure de chaque dimension de la boîte.
* *Option 2 :* `{"middle", "width", "height"}`. Fournissez un ensemble de coordonnées spécifiant les coordonnées `middle` sous la forme `[x,y]`, ainsi que `width` et `height` sous forme de scalaires.
* `class_id` : un entier représentant l’identité de classe de la boîte. Voir la clé `class_labels` ci-dessous.
* `scores` : un dictionnaire d’étiquettes sous forme de chaînes et de valeurs numériques pour les scores. Peut être utilisé pour filtrer les boîtes dans l’UI.
* `domain` : spécifie les unités/le format des coordonnées de la boîte. **Définissez cette valeur sur "pixel"** si les coordonnées de la boîte sont exprimées dans l’espace des pixels, par exemple sous forme d’entiers compris dans les dimensions de l’image. Par défaut, le domaine est supposé être une fraction/un pourcentage de l’image, exprimé sous forme de nombre à virgule flottante entre 0 et 1.
* `box_caption` : (facultatif) une chaîne à afficher comme texte d’étiquette sur cette boîte
* `class_labels` : (facultatif) un dictionnaire associant les `class_id` à des chaînes. Par défaut, nous générons des étiquettes de classe `class_0`, `class_1`, etc.
Consultez cet exemple :
```python theme={null}
import wandb
class_id_to_label = {
1: "car",
2: "road",
3: "building",
# ...
}
img = wandb.Image(
image,
boxes={
"predictions": {
"box_data": [
{
# une boîte exprimée dans le domaine relatif/fractionnel par défaut
"position": {"minX": 0.1, "maxX": 0.2, "minY": 0.3, "maxY": 0.4},
"class_id": 2,
"box_caption": class_id_to_label[2],
"scores": {"acc": 0.1, "loss": 1.2},
# une autre boîte exprimée dans le domaine des pixels
# (à titre d'illustration uniquement, toutes les boîtes sont
# susceptibles d'être dans le même domaine/format)
"position": {"middle": [150, 20], "width": 68, "height": 112},
"domain": "pixel",
"class_id": 3,
"box_caption": "a building",
"scores": {"acc": 0.5, "loss": 0.7},
# ...
# Journalisez autant de boîtes que nécessaire
}
],
"class_labels": class_id_to_label,
},
# Journalisez chaque groupe significatif de boîtes avec un nom de clé unique
"ground_truth": {
# ...
},
},
)
with wandb.init(project="my_project") as run:
run.log({"driving_scene": img})
```
 Pour journaliser des masques de segmentation dans Tables, vous devez fournir un objet `wandb.Image` pour chaque ligne du tableau.
Un exemple est fourni dans l’extrait de code ci-dessous :
```python theme={null}
table = wandb.Table(columns=["ID", "Image"])
for id, img, label in zip(ids, images, labels):
mask_img = wandb.Image(
img,
masks={
"prediction": {"mask_data": label, "class_labels": class_labels}
# ...
},
)
table.add_data(id, mask_img)
with wandb.init(project="my_project") as run:
run.log({"Table": table})
```
Pour journaliser des masques de segmentation dans Tables, vous devez fournir un objet `wandb.Image` pour chaque ligne du tableau.
Un exemple est fourni dans l’extrait de code ci-dessous :
```python theme={null}
table = wandb.Table(columns=["ID", "Image"])
for id, img, label in zip(ids, images, labels):
mask_img = wandb.Image(
img,
masks={
"prediction": {"mask_data": label, "class_labels": class_labels}
# ...
},
)
table.add_data(id, mask_img)
with wandb.init(project="my_project") as run:
run.log({"Table": table})
```
 Pour journaliser des images avec des boîtes englobantes dans Tables, vous devez fournir un objet `wandb.Image` pour chaque ligne du tableau.
Un exemple est fourni dans l’extrait de code ci-dessous :
```python theme={null}
table = wandb.Table(columns=["ID", "Image"])
for id, img, boxes in zip(ids, images, boxes_set):
box_img = wandb.Image(
img,
boxes={
"prediction": {
"box_data": [
{
"position": {
"minX": box["minX"],
"minY": box["minY"],
"maxX": box["maxX"],
"maxY": box["maxY"],
},
"class_id": box["class_id"],
"box_caption": box["caption"],
"domain": "pixel",
}
for box in boxes
],
"class_labels": class_labels,
}
},
)
```
Pour journaliser des images avec des boîtes englobantes dans Tables, vous devez fournir un objet `wandb.Image` pour chaque ligne du tableau.
Un exemple est fourni dans l’extrait de code ci-dessous :
```python theme={null}
table = wandb.Table(columns=["ID", "Image"])
for id, img, boxes in zip(ids, images, boxes_set):
box_img = wandb.Image(
img,
boxes={
"prediction": {
"box_data": [
{
"position": {
"minX": box["minX"],
"minY": box["minY"],
"maxX": box["maxX"],
"maxY": box["maxY"],
},
"class_id": box["class_id"],
"box_caption": box["caption"],
"domain": "pixel",
}
for box in boxes
],
"class_labels": class_labels,
}
},
)
```